Over the past few years, we have developed and tested some walking
robots both for entertainment and for testing of efficient ways to obtain
quadrupedal motion with varying gaits.
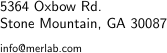
Remote-controlled mammoth using linkage-based leg
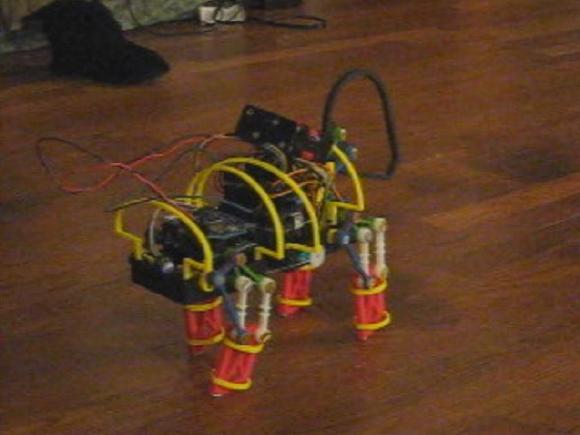
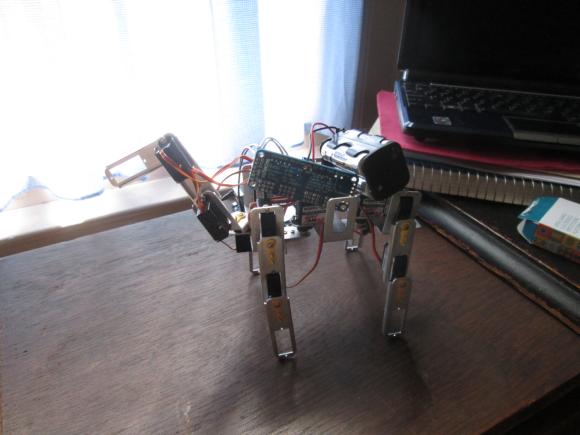
actuationRemote-controlled mammoth final assemblyTest assembly for direct joint actuation of a quadruped
walker